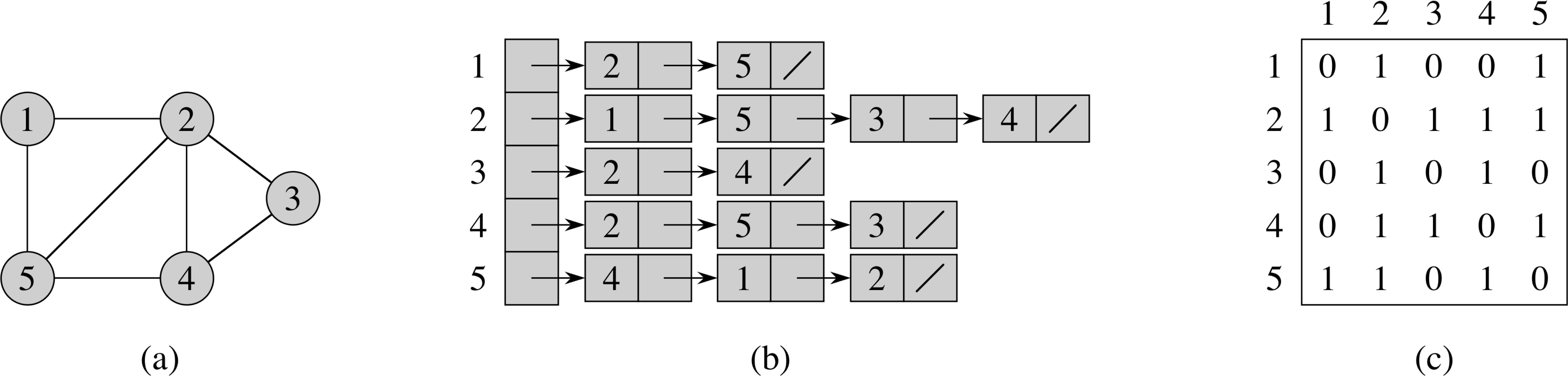
Representing Graphs: Undirected
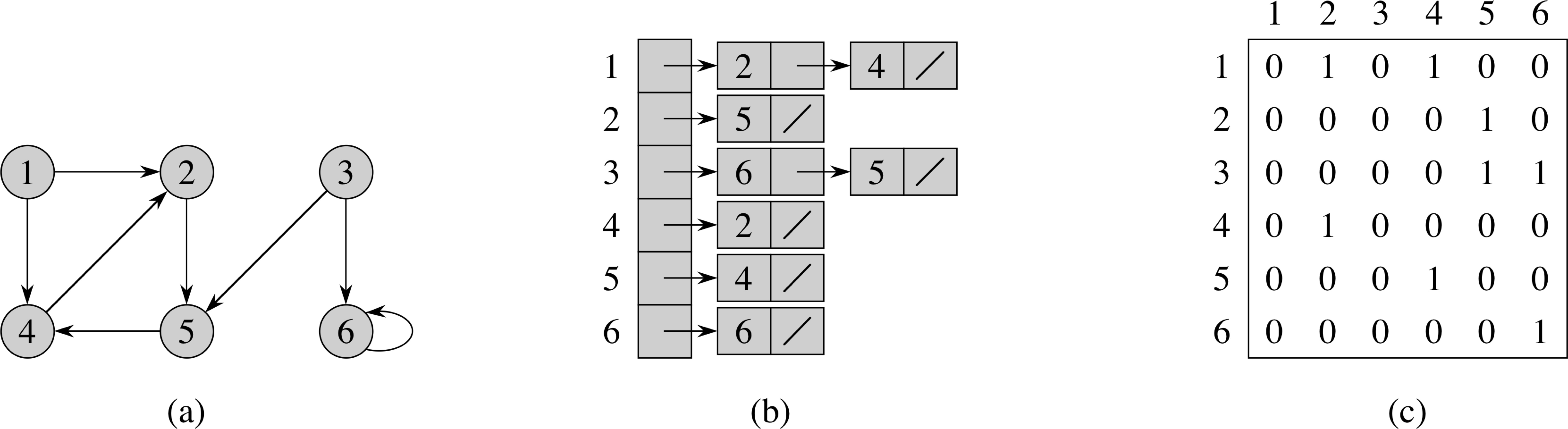
Representing Graphs: Directed
DFS: Example
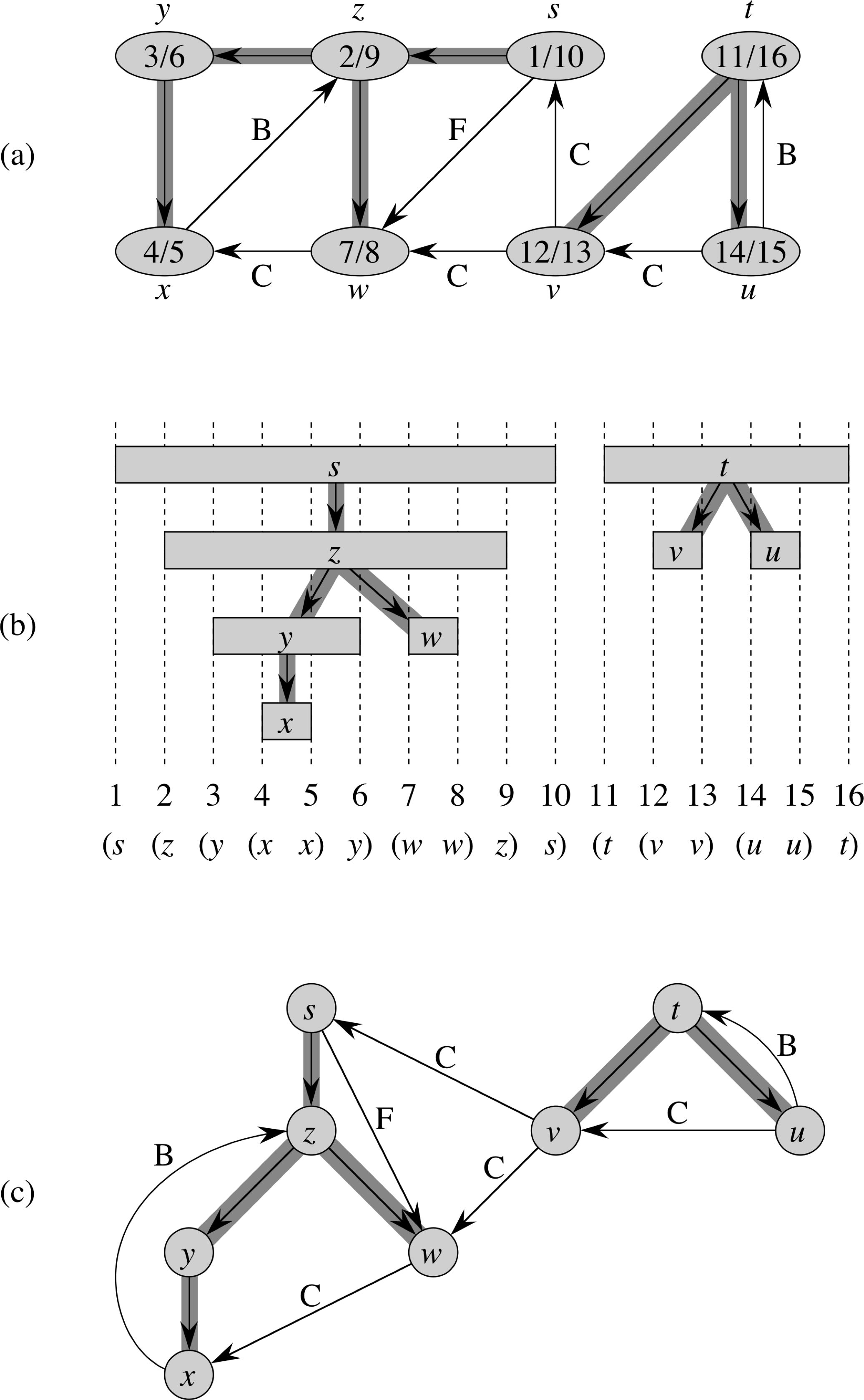
Topological Sort
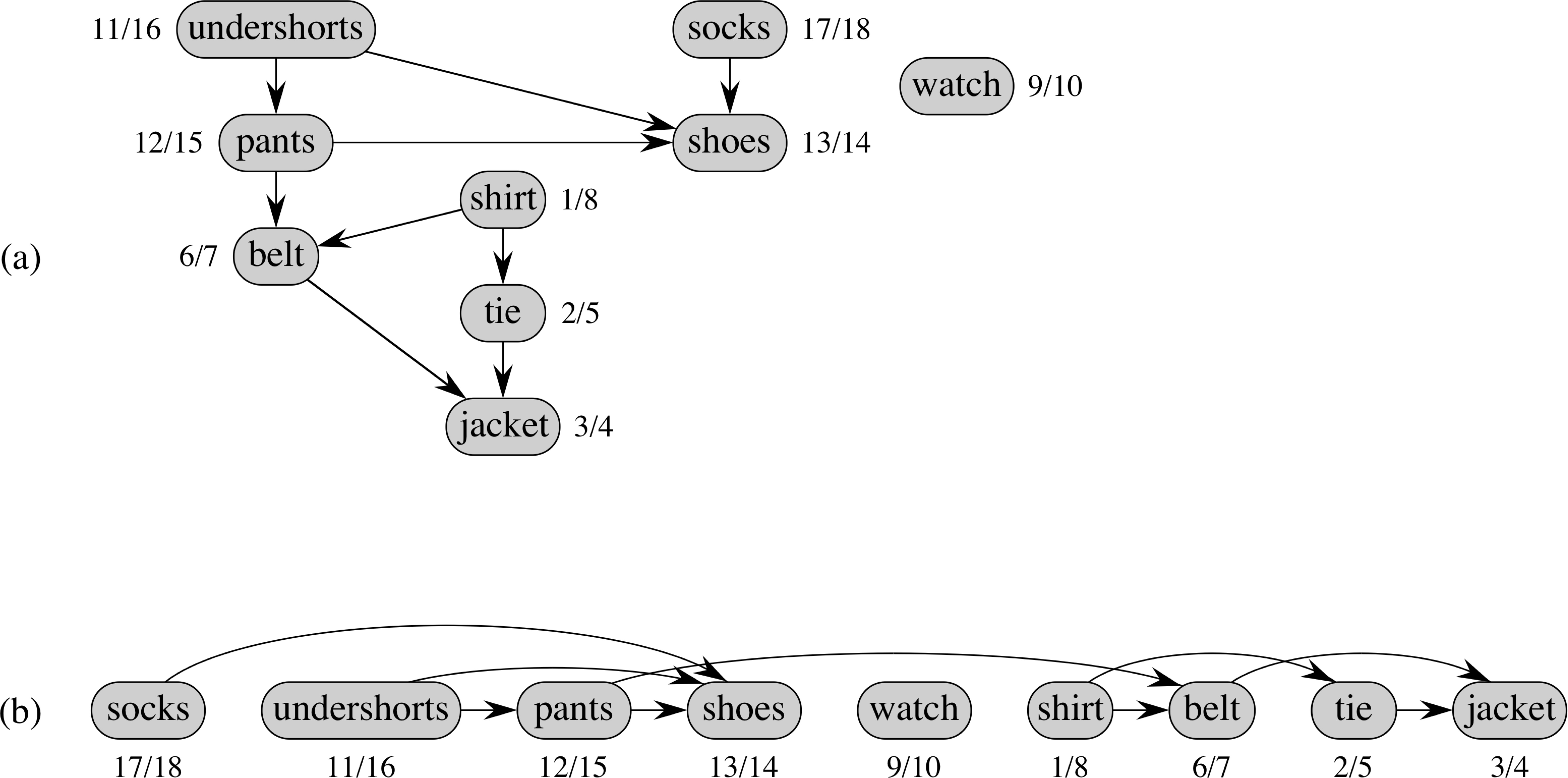
Topological-Sort(G) 1 call DFS(G) to compute finishing times v.f for each vertex v 2 as each vertex is finished, insert it onto the front of a linked list 3 return the linked list of vertices
Why does this work?
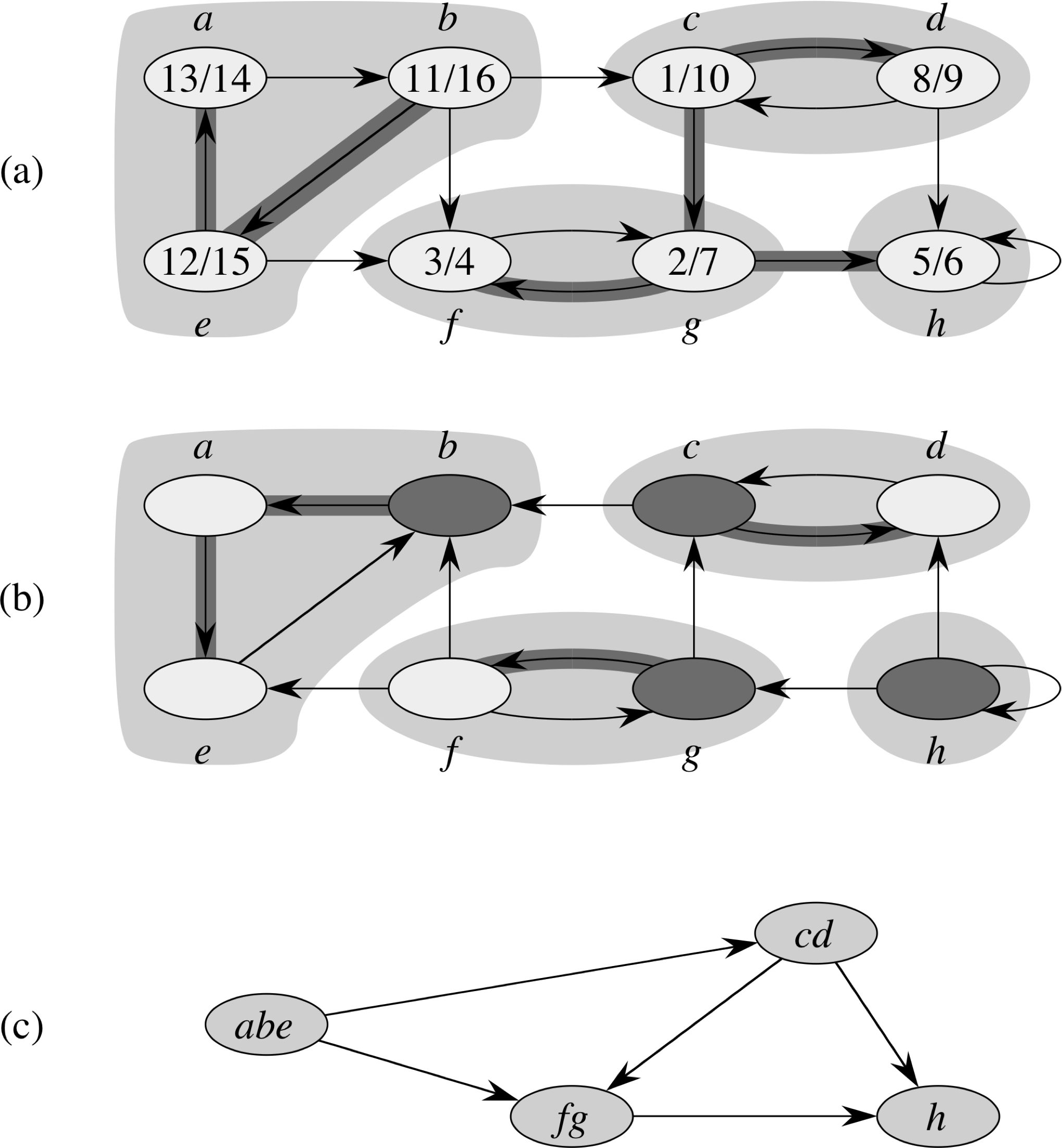
Strongly Connected Components
Observations
- Negative weight edges are fine
- Negative weight cycles cause the problem to be ill-defined. Why?
- Shortest paths can be represented using the predecessor sub-graph (as DFS-forests and BFS-trees)
Two Key Steps
Initialize-Single-Source(G, s) 1 for each vertex v ∈ G.V 2 v.d = ∞ 3 v.π = NIL 4 s.d = 0 |
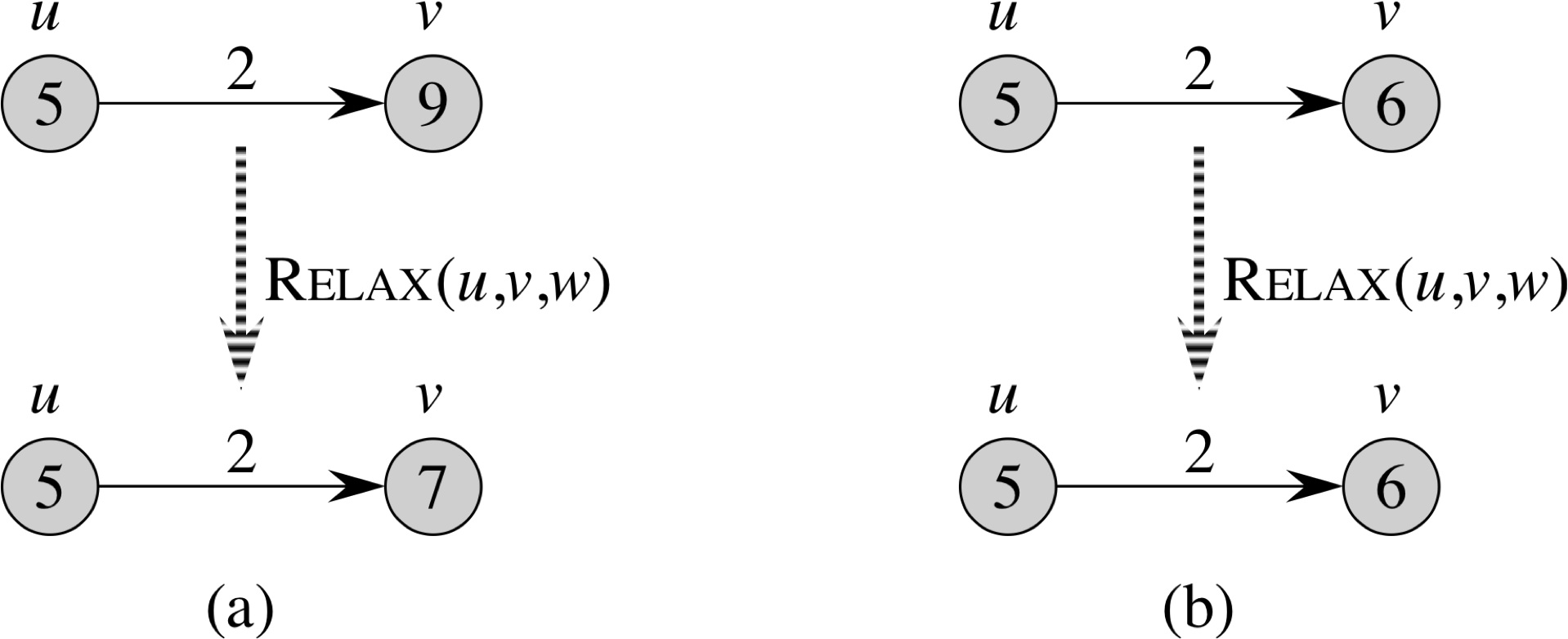
Relax(u, v, w) 1 if v.d > u.d + w(u.v) 2 v.d = u.d + w(u,v) 3 v.π = u |
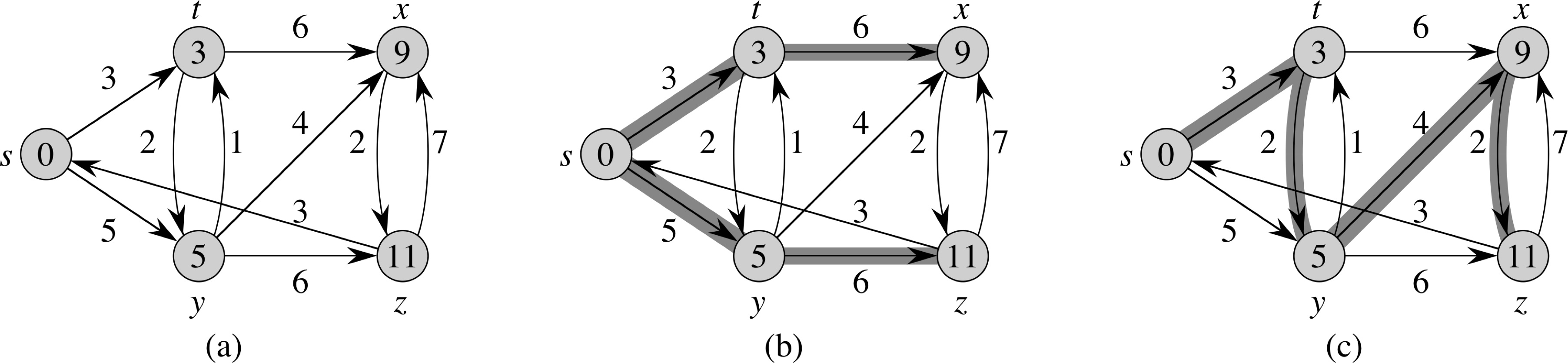
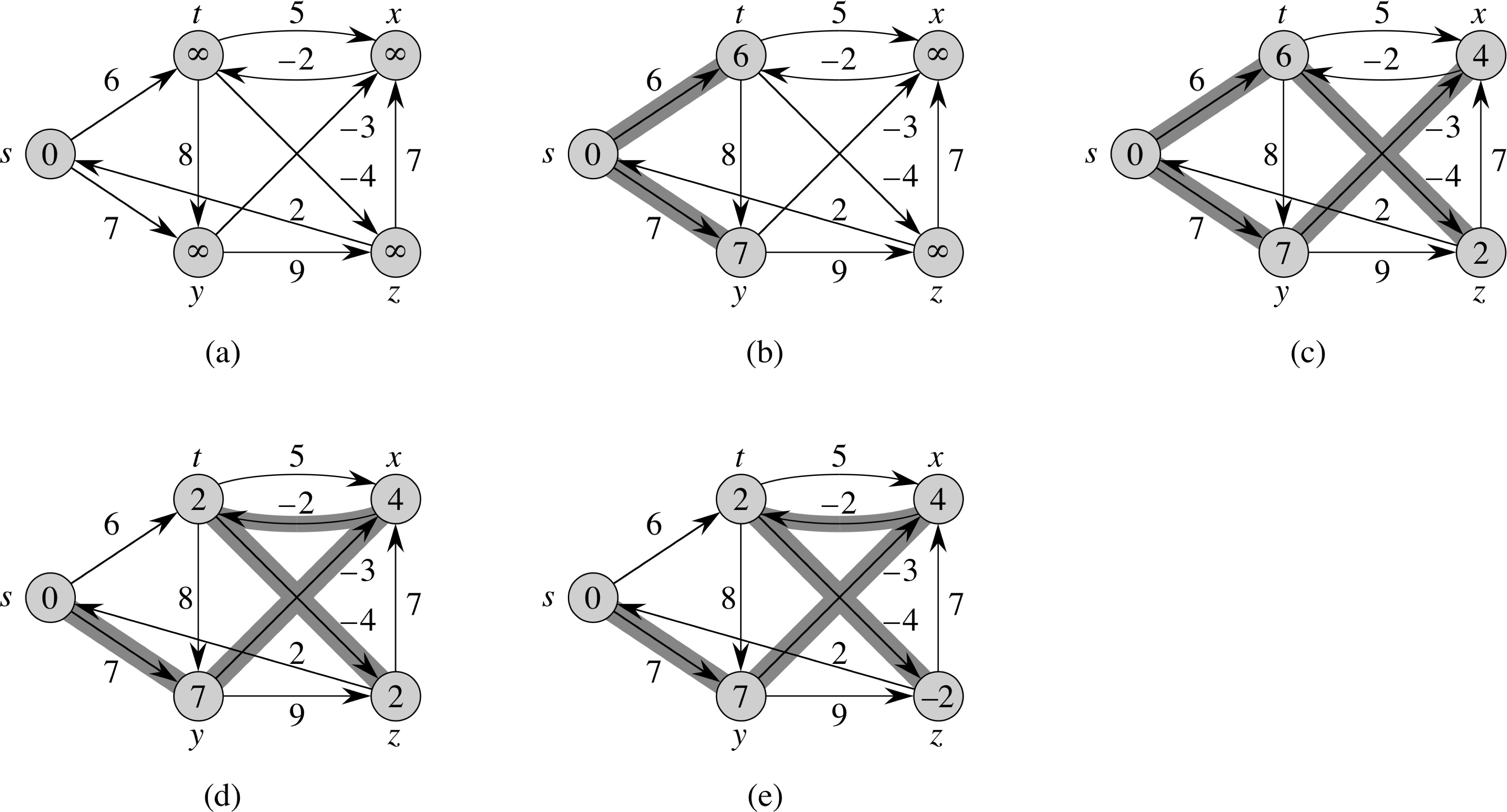
Bellman-Ford Algorithm
Bellman-Ford(G, w, s) 1 Initialize-Single-Source(G, s) 2 for i = 1 to |G.V|-1 3 for each edge (u,v) ∈ G.E 4 Relax(u, v, w) 5 for each edge (u,v) ∈ G.E 6 if v.d > u.d + w(u,v) 7 return FALSE 8 return TRUE
Running Time = O(VE)
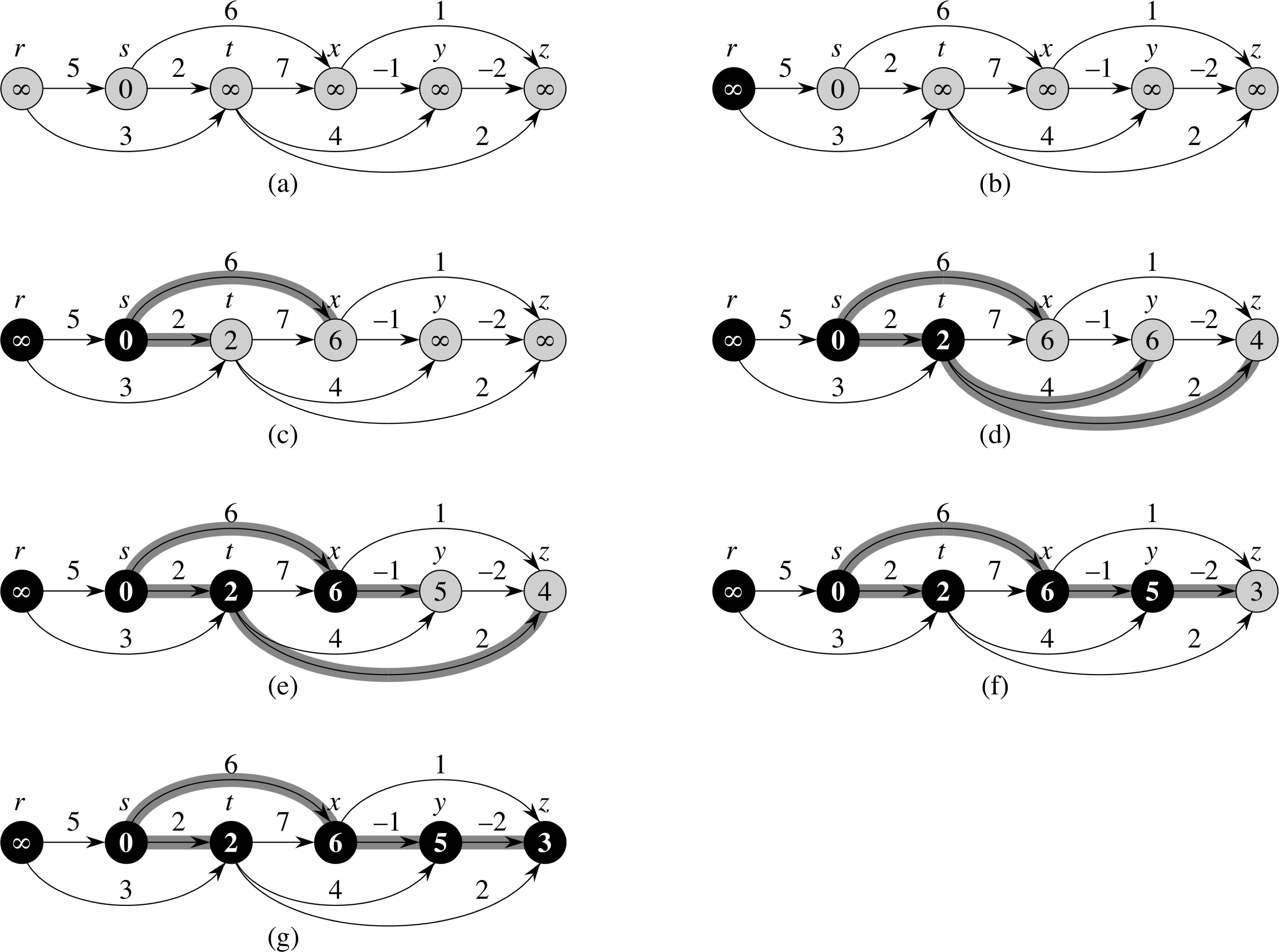
Shortest Path for DAGs
DAG-Shortest-Paths(G, w, s) 1 topologically sort the vertices of G 2 Initialize-Single-Source(G, s) 3 for each vertex u, taken in topologically sorted order 4 for each vertex v ∈ G.Adj[u] 4 Relax(u, v, w)
Running Time = Θ(V + E)
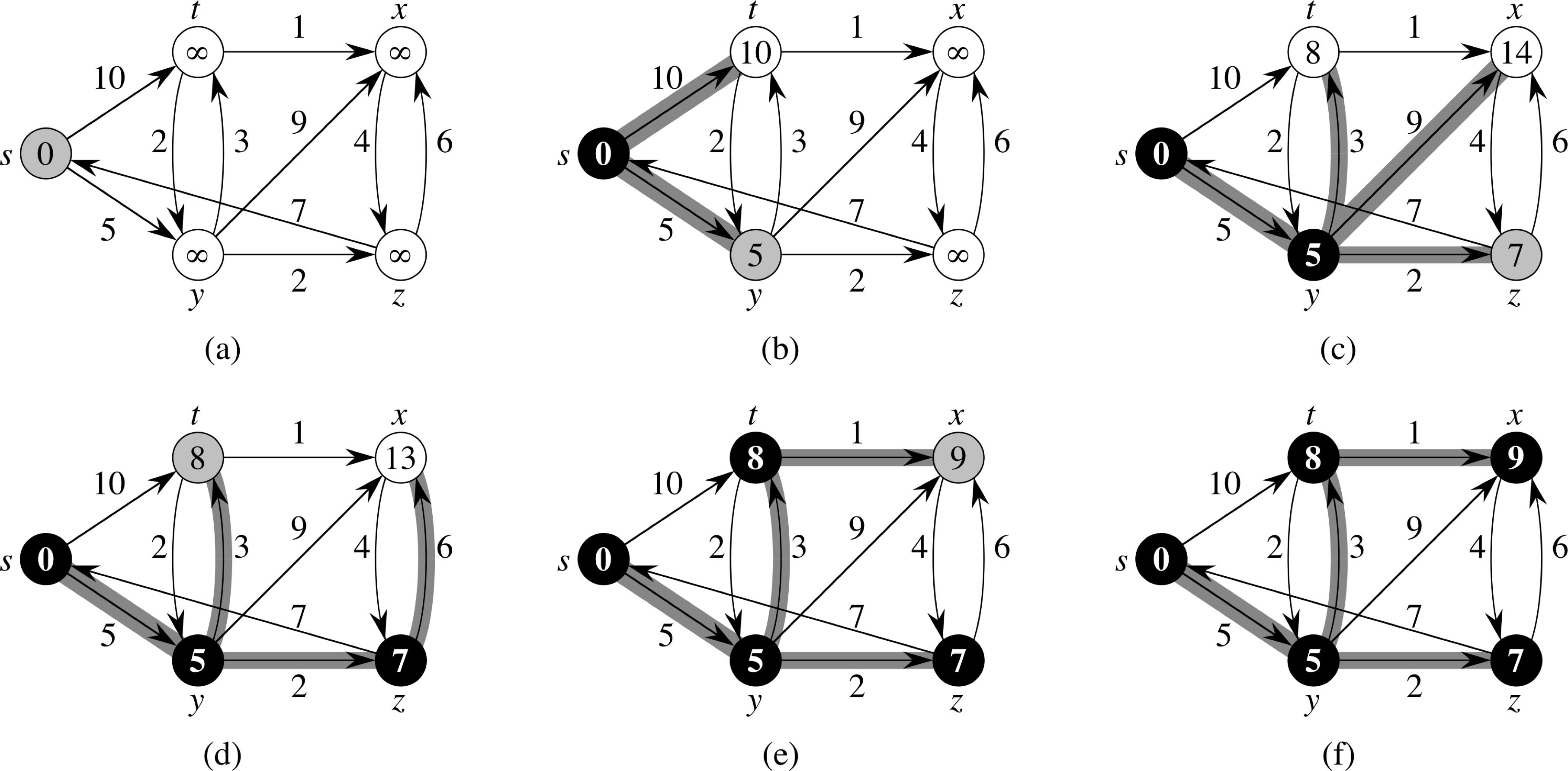
Dijkstra's Algorithm
Dijkstra(G, w, s) 1 Initialize-Single-Source(G, s) 2 S = φ 3 Q = G.V 4 while Q ≠ φ 5 u = Extract-Min(Q) 6 S = S ∪ {u} 7 for each vertex v ∈ G.Adj[u] 8 Relax(u, v, w)
Running Time = O((V + E)⋅log(V)) (O(V⋅log(V) + E) achievable)