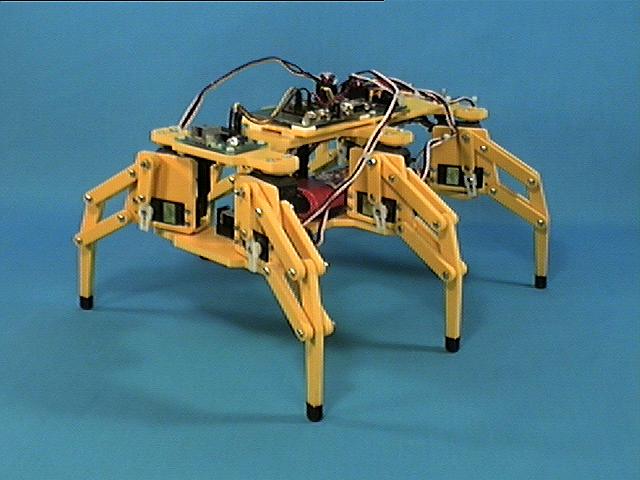
The Servobot robot was originally designed by David Braun, a computer science student. Its purpose was to provide an inexpensive agent for research in multi-agent robotics and artificial intelligence. Braun's design was subsequently commercialized by Linxmotion, Inc., which has several versions available.
Servobot was used in research by Gary B. Parker whose doctoral research developed computer programs that discover and improve repetitive mechanical actions, such as walking. He demonstrated by applying his algorithms to Servobot locomotion, showing that they could invent a very efficient walking gait in a relatively short time. One application of this research would be a setting in which a large group of robots would disperse themselves to explore a region of territory. These agents would need to adapt to different terrains, degradation of their legs, and so on.
With Parker's work as inspiration, Prof. Steve Johnson believed that the design of walking gaits would be a good way to introduce primary and secondary students to the use of computers to control physical systems and processes. A graphic user interface was created to enable students to explore and experiment with the mechanics of walking.
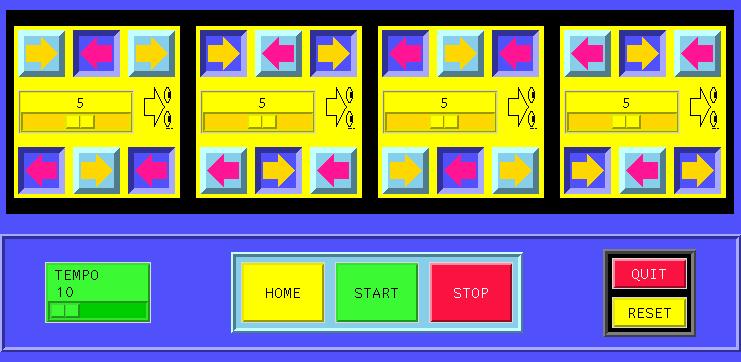
Walking is an alternating, repetitive action. A gait consists of such a sequence, cycling over and over. Each of Servobot's six legs has two degrees of motion: up/down and forward/backward. Each frame, or "step" of the design panel shown above, describes the goal for each leg. In this version of the panel, a sequence of four steps, cycling over and over, specifies a gait. Once the settings for each leg in each step have been set, the START begins sending the cycle to the robot. If the gait has been well designed, the robot will move as intended.
 In his dissertation, Evolving Cyclic Control Programs for
Multi-Legged Robots, Parker discusses the walking gaits
of insects and spiders. Like other animals, these arthropods
have a variety of gaits, used for different purposes, like
walking, running, moving straight, turning, and so on.
(Servobot is too slow and weak to cantor, trot, or gallop; it
can only walk).
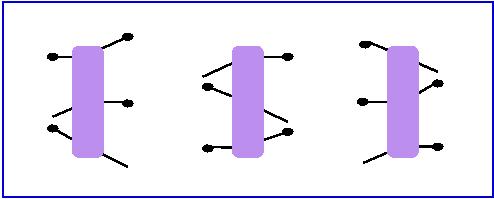
Six-legged insects exhibit two walking gaits in nature.
Normally, they use a metachronal pattern,
in which each leg strides in order, as the last to complete
its stride is raised and takes a step. Other multi-legged
(even centipedes) animals typically walk in a similar fashion.
In his dissertation, Evolving Cyclic Control Programs for
Multi-Legged Robots, Parker discusses the walking gaits
of insects and spiders. Like other animals, these arthropods
have a variety of gaits, used for different purposes, like
walking, running, moving straight, turning, and so on.
(Servobot is too slow and weak to cantor, trot, or gallop; it
can only walk).
Six-legged insects exhibit two walking gaits in nature.
Normally, they use a metachronal pattern,
in which each leg strides in order, as the last to complete
its stride is raised and takes a step. Other multi-legged
(even centipedes) animals typically walk in a similar fashion.
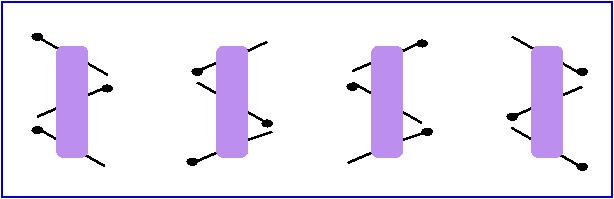 Insects sometimes use a tripod gait, in which
alternating triangles take a stride at the same time.
This gait is similar to the way two-legged animals walk.
Insects sometimes use a tripod gait, in which
alternating triangles take a stride at the same time.
This gait is similar to the way two-legged animals walk.
Of course, in both cases, the leg cycles are refined to make the motion smooth and efficient, and adaptable to injuries and different terrains.